Types of sensors in Automobile
Let us know what is mean by sensor first…
Sensor
Sensors are the device which detects or
measures physical property and responds to some type of inputs produced from environment or certain component. Inputs may be
light,heat,motion,moisture,pressure,etc.
Types of sensors
1. Active
sensor
2. Passive
sensor
Active sensor
Active sensors are
sensors that transmit some kind of energy such as
Microwave, sound, light,.into
the environment.And it detects the
changes that occur on the transmitted energy.That means it transmits
and detects at the same time and with changed in energy different gives you a
distance, speed, rotation.
Passive sensor
passive sensors don't
transmit energy but only detects the energy
transmitted (generated) from an energy source
(magnetic coil),
e.g. motion detectors
which are mostly passive infrared sensors.
In an automobile we
could find the sensor like
1. Oxygen
sensor
2. Steering
angle sensor
3. Throttle
position sensor
4. Pressure
sensor
5. Hall
effect sensor
6. Crank
shaft position sensor
7. Vehicle
speed sensor
8. Temperature
sensor
1) OXYGEN
SENSOR
What is oxygen sensor?
Oxygen sensor is used
to calculate the amount of oxygen present in the air/fuel mixture in the inlet
manifold and amount of oxygen level in the exhaust gas.
HISTORY OF OXYGEN SENSOR
- First the oxygen sensor was invented by “Bosch”. In 1899, a German named Professor Walter Nernst developed the "Nernst Cell," a gas-tight ceramic electrolyte that becomes electrically conductive at temperatures above 620F.The Nernst Cell transfers oxygen ions from the air inside of the cell to the air outside the cell, generating at the same time a measurable voltage.
- The voltage level generated depends upon the difference in oxygen content between the gas inside and outside of the cell. The generated voltage is converted as oxygen level.

- In the early 1900s it had little practical application of this oxygen sensor. Now, fast forward to the 1970s, when the Environmental Protection Agency (EPA) launched stringent exhaust gas emission regulations.
- To meet these regulations, an engine was required to be equipped with a catalytic converter, and to keep it operating correctly required some way of measuring the amount of oxygen in the exhaust system.
- The oxygen sensor, also called as lambda sensor, because it gives an indication of the ratio of air to fuel (called the lambda ratio) being consumed by the engine. Volvo was the first to use an oxygen sensor, in 1977, when it equipped California- bound Volvo 240 models with the device. There is no need of every car maker to monitor and adjust the fuel mixture in their engines and control exhaust emissions.
- They added On Board Diagnostics (OBD) in 1998 suddenly made two oxygen sensors necessary,one ahead of and one after the converter, effectively doubling the market for the devices. In fact, many cars with V6 and V8 engines now have four oxygen sensors,two for each bank of cylinders.
WORKING OF OXYGEN SENSOR
- Oxygen sensors works by different in the amounts of oxygen level in the vehicle exhaust gas and the amount of oxygen level in the atmosphere. An oxygen sensor generates a voltage signal,due to this oxygen level variation.This signal is sent to the onboard computer or ECM (Engine Control Module), which in turn regulates the air fuel mixture to the desired optimal level.
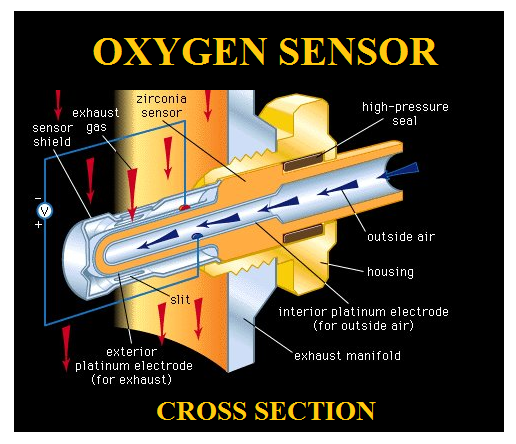
- The sensing element on an oxygen sensor is generally a ceramic cylinder plated inside and out with porous platinum electrodes and protected in a housing which protects it against mechanical effects and facilitates mounting. The ceramic body is made of stabilised zirconium dioxide (Zirconia). Its surfaces are coated with electrodes made of a gas permeable platinum layer.

- The outside of the cylinder is exposed to the hot exhaust gases, while the inside is vented internally through the sensor body or wiring to the outside atmosphere. A voltage is produced by the difference in the two amounts.
- If the amount of oxygen in the exhaust is closer to the amount in the air, the engine is lean and the voltage is low (normally 0.1 to 0.3 volts). If the engine is rich the voltage is high (generally 0.8 to 0.9 volts).
- The oxygen sensor is located in the exhaust manifold down pipes before the catalytic converter or between the exhaust manifolds and the catalytic converters.
- Engine management systems also control and monitor the operation of the vehicles catalytic converter, so in recent years there has been a rapid increase in vehicles on our roads using pre and post catalytic converter oxygen sensors.
APPLICATION
1. Automobile
(To measure Oxygen level in exhaust gas and inlet manifold)
2. Boiler/Furnace
Efficiency improvement for Coal/Oil/Gas/Biomass
3. Aviation
– OBOGS and OBIGGS
4. Agriculture
5. Medical
and laboratory equipment
6. Aquarium
7. Engine
and MOT test emissions.
2) STEERING ANGLE SENSOR
What
is steering angle sensor?
The
steering angle sensor (SAS) is a critical part of the ESC (Electronic Stability
Control) system that measures the steering wheel position angle and rate of
turn. A scan tool can be used to obtain this data in degrees.The SAS is located
in a sensor cluster in the steering column.
HISTORY OF ELECTRONIC STEERING
CONTROL
- In 1995, three automobile manufacturers introduced ESC systems. Mercedes-Benz, supplied by Bosch, was the first to implement ESP (Electronic Stability Program) with their Mercedes-Benz S 600.That same year BMW, supplied by Bosch and ITT Automotive introduced the system on the BMW 7 series (E38).

- Indeed, all ESC manufacturers emphasis that the system is not a performance enhancement nor a replacement for safe driving practises, but rather a safety technology to assist the driver in recovering from dangerous situations. ESC does not increase traction, so it does not enable faster cornering (although it can facilitate better-controlled cornering). More generally, ESC works within inherent limits of the vehicle's handling and available traction between the tyres and road.
- ESC intervenes only when it detects a probable loss of steering control, i.e. when the vehicle is not going where the driver is steering.This may happen, for example, when skidding during emergency evasive swerves, understeer or oversteer during poorly judged turns on slippery roads, or hydroplaning.
- During normal driving, ESC works in the background and continuously monitors steering and vehicle direction. It compares the driver's intended direction (determined through the measured steering wheel angle) to the vehicle's actual direction (determined through measured lateral acceleration, vehicle rotation (yaw), and individual road wheel speeds).
WORKING OF STEERING ANGLE SENSOR

- The steering-angle sensor has two potentiometers offset by 90°. The steering-wheel angle determined by these two potentiometers covers one full steering wheel turn each of these values is repeated after +/- 180°. The steering angle sensor knows this and counts the steering-wheel revolutions accordingly. The overall steering wheel angle is thus made up of the current steering wheel angle together with the number of steering wheel rotations.
- The overall steering wheel angle is available at any time, uninterrupted detection of all steering wheel movements even when the vehicle is stationary. In order to achieve this, the steering angle sensor is permanently supplied with power from Terminal 30.This means that steering- wheel movements are also detected with ”ignition off”.
- The steering angle detected by the potentiometers remains available even after interruptions to the power supply; the number of steering wheel revolutions, however, is not. In order that the steering angle sensor remains functional after power supply interruptions, software that calculates the number of steering wheel rotations on the basis of the speed of rotation of the road wheels (and, on some models, the steering wheel being turned from lock to lock) has been integrated.
- This process is referred to as initialisation or imposition. If imposition does not succeed by the time a speed of approx. 20 km/h is reached from a standing start, the DSC is switched to passive mode, the DSC warning lamp comes on, and a fault is recorded on the DSC control unit. The imposition process is performed whenever the ignition is switched on if the number of steering wheel revolutions is not available. Four-wheel drive vehicles are an exception to this rule.

- The DSC system is immediately switched to passive mode and a fault entered in the DSC control unit memory if there has been an interruption in the power supply to the steering angle sensor. In contrast with conventional-drive vehicles, the imposition process is then not aborted on reaching a specific road speed, but rather continued until the DSC is receiving correct steering angle data.
- At that point, the DSC warning light goes out and the DSC is operational again. In both cases, there is no fault recorded on the steering angle sensor. As an additional safety measure, the DSC control unit calculates the steering angle on the basis of the speed of the road wheels and compares it with the information supplied by the steering angle sensor.
- This plausibility check prevents the vehicle operating on the basis of incorrect calibration. An incorrect zero position can result from incorrect calibration or alteration of the steering geometry as a result of damage or repairs. Another safety factor is precise assignment of sensor to vehicle.
3) THROTTLE POSITION
What
is Throttle Position Sensor ?
A
throttle position sensor (TPS) is a sensor used to monitor the throttle
position of a car.The sensor is usually located on the butterfly spindle/shaft
so that it can directly monitor the position of the throttle.
HISTORY
OF THROTTLE POSITION SENSOR
- The addition of the Throttle Position Sensor in the late 1970s began the transformation to electronically controlled fuel induction systems. A means of sensing throttle position became necessary as the need to regulate the air fuel ratio more precisely evolved.

- This was in response to clean air regulation introduced in the70s. By the end of the decade throttle position sensors, electrically controlled carburetors, catalytic converters and an engine control unit (ECU) were added to create this more efficient fuel system.
WORKING OF THROTTLE POSITION SENSOR
- The “THROTTLE POSITION SENSOR’ is commonly used in modern fuel-injected engines used in cars and other vehicles. Usually located in the butterfly spindle attached to the body of engine. The throttle position sensor works by monitoring the position of the throttle valve in engine and sends the throttle position in a form of signals to the ECU (Engine Control Unit).

- The throttle plate is linked mechanically to the accelerator pedal. When the driver depresses the accelerator pedal, this linkage causes the throttle plate angle to increase, allowing more air to enter the engine and thereby increasing engine power. Measurement of the instantaneous throttle angle is important for control purposes. Most throttle angle sensors are essentially potentiometers.

- A potentiometer consists of a resistor with a movable TPS wiper Arm. A section of resistance material is placed in an arc around the pivot axis for the movable wiper Arm. One end of the resistor is connected to ground, the other to a fixed voltage V( 5 volts). The voltage at the contact point of the movable contact is proportional to the angle (a) from the ground contact to the movable contact. Thus, where v(a) is the voltage at the contact point, k is a constant, and a is the angle of the contact point from the ground connection.

- This potentiometer can be used to measure any angular rotation. In particular, it is well suited for measuring throttle angle. For digital engine control, the voltage v(a) must be converted to digital format using an analog-to-digital converter then it is send to the ECU.
4) PRESSURE
what is pressure sensor ?
A pressure sensor measures pressure,
typically of gases or liquids. Pressure is an expression of
the force required to stop a fluid from expanding, and is usually stated in
terms of force per unit area. A pressure sensor usually acts as a
transducer it generates a signal as a function of the pressure imposed.
HISTORY OF PRESSURE
SENSOR
- In 1973 William R. Poyle applied for a patent for capacitive transducers on glass or quartz basis, Bob Bell of Kavlicoon ceramic basis a few years later in 1979. This technology filled the gap for lower pressure ranges (for which thin film was not suited) and is today, also with resistors on ceramic diaphragms.
- In Piezoelectric pressure sensors Quartz crystals are used to ensure stable, repeatable operation. The quartz crystals are usually preloaded in the housings to ensure good linearity. Tourmaline, another stable naturally piezoelectric crystal, may be used in sensors where volumetric sensitivity is required.The Piezoelectric pressure sensors measure only dynamic pressure.This sensor are available in various shapes and thread configurations to allow suitable mounting for various types of pressure measurements.

- When a positive pressure is applied to an pressure sensor, the sensor yields a positive voltage. The polarity of charge mode pressure sensors is the opposite: when a positive pressure is applied, the sensor yields a negative output. Charge output sensors are usually used with external charge amplifiers that invert the signal. The resulting system output polarity of a charge output sensor used with a charge amplifier produces an output that is the same as an Most piezoelectric pressure sensors are constructed with either compression mode quartz crystals preloaded in a rigid housing or unconstrained tourmaline crystals.
- These designs give the sensors microsecond response times and resonant frequencies in the hundreds of kilohertz, with minimal overshoot or ringing.
- The low frequency response of a charge mode pressure sensor is determined by the charge amplifier. The discharge time constant (DTC) of the amplifier that sets the low frequency response can be very long or very short depending on the charge amplifier model used. A longer DTC allows for lower frequency measurements. A shorter DTC will limit the low frequency response.
- The quartz crystals of a piezoelectric pressure sensor generate a charge when pressure is applied. Even though the electrical insulation resistance is quite large, the charge eventually leaks to zero. The rate at which the charge leaks back to zero is dependent on electrical insulation resistance.
- Automotive in-cylinder pressures, ballistic pressures, and free-field blasts,where thermal shock accompanies the pressure pulse. The thermal shock can be in the form of a radiant heat, such as the flash from an explosion, heat from convection of hot gasses passing over a pressure sensor diaphragm, or conductive heat from a hot liquid.
- In 2000 The piezoresistive technology is the most universal one. It applies for pressure ranges from 100 mbar to 1500 bar in the absolute, gauge and differential pressure mode.
WORKING OF PRESSURE SENSOR

- The mechanical structure of the pressure sensor will impose a high frequency limit. The sensitivity begins to rise rapidly as the natural frequency of the sensor is approached.It is generally acceptable to use sensors over a range where the sensitivity deviates by less than ± 5%. The upper frequency limit occurs at approximately 20% of the sensor resonant frequency.
- The high frequency response can be limited by drive current, cable length and cable capacitance.

- Internal resistance and capacitance values set the discharge time constant and the low frequency response of pressure sensors. The discharge time constant establishes the low frequency response analogous to the action of a first order R-C high pass filter. The DTC of the signal conditioner should also to be taken into consideration. It influences the low frequency response of the overall system.
- In a charge mode pressure sensor with a voltage amplifier, the leakage rate is fixed by capacitance and resistance values in the sensor, low noise cable, and the external source follower voltage amplifier. When a charge mode pressure sensor is used with a charge amplifier, the leakage rate is fixed by the electrical feedback resistor and capacitor in the charge amplifier.
- Virtually all pressure sensors are sensitive to thermal shock. When heat strikes the diaphragm of a piezoelectric pressure sensor that has crystals contained in an outer housing, the heat can cause an expansion of the case surrounding the internal crystals. Although quartz crystals are not significantly sensitive to thermal shock, the case expansion causes a lessening of the preload force on the crystals causing a negative signal output.
- To minimize this effect, various methods are used.Certain quartz pressure sensors feature internal thermal isolation designs to minimize the effects of thermal shock. Some models feature baffled diaphragms. Others that are designed to maximize the frequency response may require thermal protection coating, recess mounting, or a combination of these to lessen the thermal shock effects.
- Coatings include silicone grease, (may also be used to fill a recess mounting hole),(Room Temperature Vulcanization) RTV silicone rubber, vinyl electrical tape, and ceramic. The RTV and tape are used as ablatives, while the ceramic coating is used to protect diaphragms from corrosive gasses and particle impingement.
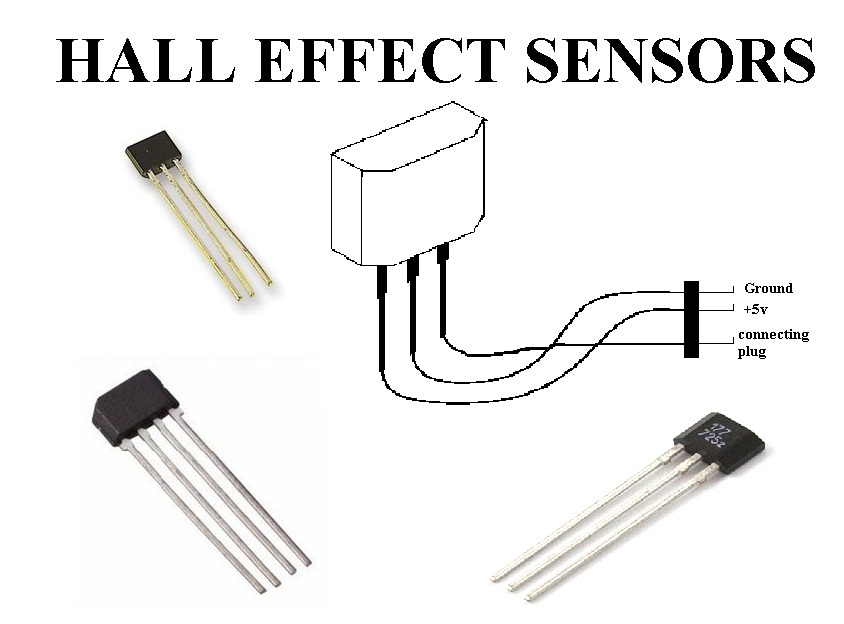
5)HALL
EFFECT SENSOR
what
is hall effect sensor ?
- Generally magnetic sensors are designed to respond to a wide range of positive and negative magnetic fields in a variety of different applications and one type of magnet sensor whose output signal is a function of magnetic field density around it is called the Hall Effect Sensor.
- A Hall effect sensor is a transducer that varies its output voltage in response to a magnetic field. Hall effect sensors are used for proximity switching, positioning, speed detection, and current sensing applications. In its simplest form, the sensor operates as an analog transducer, directly returning a voltage.
HISTORY OF HALL EFFECT SENSOR
- The Hall effect is the production of a voltage difference (the Hall voltage) across an electrical conductor, transverse to an electric current in the conductor and a magnetic field perpendicular to the current. It was discovered by Edwin Hall in 1879.
- The Hall coefficient is defined as the ratio of the induced electric field to the product of the current density and the applied magnetic field. It is a characteristic of the material from which the conductor is made, since its value depends on the type, number, and properties of the charge carriers that constitute the current.
WORKING
OF HALL EFFECT SENSOR
- Hall Effect Sensors are devices which are activated by an external magnetic field. We know that a magnetic field has two important characteristics flux density, (B) and polarity (North and South Poles).
- The output signal from a Hall effect sensor is the function of magnetic field density around the device. When the magnetic flux density around the sensor exceeds a certain pre-set threshold, the sensor detects it and generates an output voltage called the Hall Voltage, VH.
Hall
Effect Sensor Principals

- Hall Effect Sensors consist basically of a thin piece of rectangular p-type semiconductor material such as gallium arsenide (GaAs), indium antimonide (InSb) or indium arsenide (InAs) passing a continuous current through itself.
- When the device is placed within a magnetic field, the magnetic flux lines exert a force on the semiconductor material which deflects the charge carriers, electrons and holes, to either side of the semiconductor slab. This movement of charge carriers is a result of the magnetic force they experience passing through the semiconductor material.
- As these electrons and holes move side wards a potential difference is produced between the two sides of the semiconductor material by the build-up of these charge carriers. Then the movement of electrons through the semiconductor material is affected by the presence of an external magnetic field which is at right angles to it and this effect is greater in a flat rectangular shaped material.
- The effect of generating a measurable voltage by using a magnetic field is called the Hall Effect after.To generate a potential difference across the device the magnetic flux lines must be perpendicular, (90o) to the flow of current and be of the correct polarity, generally a south pole.
- The Hall effect provides information regarding the type of magnetic pole and magnitude of the magnetic field. For example, a south pole would cause the device to produce a voltage output while a north pole would have no effect. Generally, Hall Effect sensors and switches are designed to be in the “OFF”, (open circuit condition) when there is no magnetic field present. They only turn “ON”, (closed circuit condition) when subjected to a magnetic field of sufficient strength and polarity.
6) CRANK SHAFT
POSITION SENSOR
what is crank shaft position sensor?
A crank shaft position sensor is an
electronic device used in an internal combustion engine to monitor the position
or rotational speed of the crank shaft. This information is used by engine
management systems to control ignition system timing and other engine parameters.

WORKING OF CRANK SHAFT POSITION SENSOR
- In electronic engine control it is often desirable to measure the angular position of the engine relative to a specific point in the cycle. For such measurement it is normally necessary to measure the position of the crank shaft.
- This sensor detects a reference point on the angular position of the crank shaft that defines a beginning to a complete engine cycle (e.g., power stroke for all cylinders). Once this reference point has been detected. Crank shaft position measurements provide sufficient information for timing fuel injection pulses and ignition.
- It is desirable to measure engine angular position with a non-contacting sensor to avoid mechanical wear and corresponding changes in accuracy of the measurement. The two most common methods for non contact coupling to a rotating shaft is to employ magnetic fields or optics.
Magnetic
Reluctance Type
- This sensor is of the magnetic reluctance type and is based on the concept of a magnetic circuit. A magnetic circuit is a closed path through a magnetic material (e.g., iron, cobalt, nickel, or synthetic magnetic material called ferrite). In the case of the sensor in the following figure, the magnetic circuit is the closed path through the magnet material and across the gap between the pole pieces.
- The magnetic field in a magnetic circuit is described by a pair of field quantities that can be compared to the voltage and current of an ordinary electric circuit. One of these quantities is called the magnetic field intensity
- It exerts a force similar to the voltage of a battery. The response of the magnetic circuit to the magnetic field intensity is described by the second quantity, which is called magnetic flux. A line of constant magnetic flux is a closed path through the magnetic material. The magnetic flux is similar to the current that flows when a resistor is connected across a battery to form a closed electrical circuit.

- As we shall see, the voltage generated by the reluctance sensor is deter-mined by the strength of this magnetic flux. The strength of the magnetic flux is, in turn, determined by the reluctance of the magnetic circuit. Reluctance is to a magnetic circuit what resistance is to an electrical circuit.
- The reluctance of a magnetic circuit is inversely proportional to the magnetic permeability of the material along the path. The magnetic permeability of steel is a few thousand times larger than air. So the reluctance of steel is much lower than air. when one of the tabs of the steel disk is located between the pole pieces of the magnet, a large part of the gap between the pole pieces is filled by the steel. Since the steel has a lower reluctance than air, the ―flow‖ of magnetic flux increases to a relatively large value. On the other hand, when a tab is not between the magnet pole pieces, the gap is filled by air only.
- This creates a high- reluctance circuit for which the magnetic flux is relatively small. Thus, the magnitude of the magnetic flux that ―flows‖ through the magnetic circuit depends on the position of the tab, which, in turn, depends on the crankshaft angular position.
- The magnetic flux is least when none of the tabs is near the magnet pole pieces. As a tab begins to pass through the gap, the magnetic flux increases. It reaches a maximum when the tab is exactly between the pole pieces, and then decreases as the tab passes out of the pole piece region. In most control systems, the position of maximum magnetic flux has a fixed relationship to TDC for one of the cylinders.
- The change in magnetic flux induces a voltage, Vo, in the sensing coil that is proportional to the rate of change of the magnetic flux. Since the magnetic flux must be changing to induce a voltage in the sensing coil, its output voltage is zero whenever the engine is not running, regardless of the position of the crankshaft. This is a serious disadvantage for this type of sensor because the engine timing cannot be set statically. The coil voltage, Vo, begins to increase from zero as a tab begins to pass between the pole pieces, reaches a maximum, and then falls to zero when the tab is exactly between the pole pieces.
- Although the value of magnetic flux is maximum at this point, the rate of change of magnetic flux is zero; therefore, the induced voltage in the sensing coil is zero.Then it increases with the opposite polarity, reaches a maximum, and falls to zero as the tab passes out of the gap between the pole pieces. The coil voltage waveform occurs each time one of the cylinders reaches TDC on its power stroke.
Optical
type
- In this system a disk is directly coupled to the crankshaft. This time, the disk has holes in it that correspond to the number of tabs on the disks of the magnetic systems. Mounted on each side of the disk are fiber-optic light pipes. The hole in the disk allows transmission of light through the light pipes from the light-emitting diode (LED) source the phototransistor used as a light sensor.
- Light would not be transmitted from source to sensor when there is no hole because the solid disk blocks the light. the pulse of light is detected by the phototransistor and coupled to an amplifier to obtain a satisfactory signal level.

- The output pulse level can very easily be standard transistor logic levels of +2.4V for the high level and +0.8V for the low level. Used as pulses, the signals provide time referenced pulses that can be signal processed easily with digital integrated circuits.

- One of the problems with optical sensors is that they must be protected from dirt and oil. otherwise, they will not work properly. They have the advantages that they can sense position without the engine running and that the pulse amplitude is constant with variation in speed.

- The same sensor can also be used for measuring wheel speed.The number of electrical pulses per second from the sensor represents the speed per second.
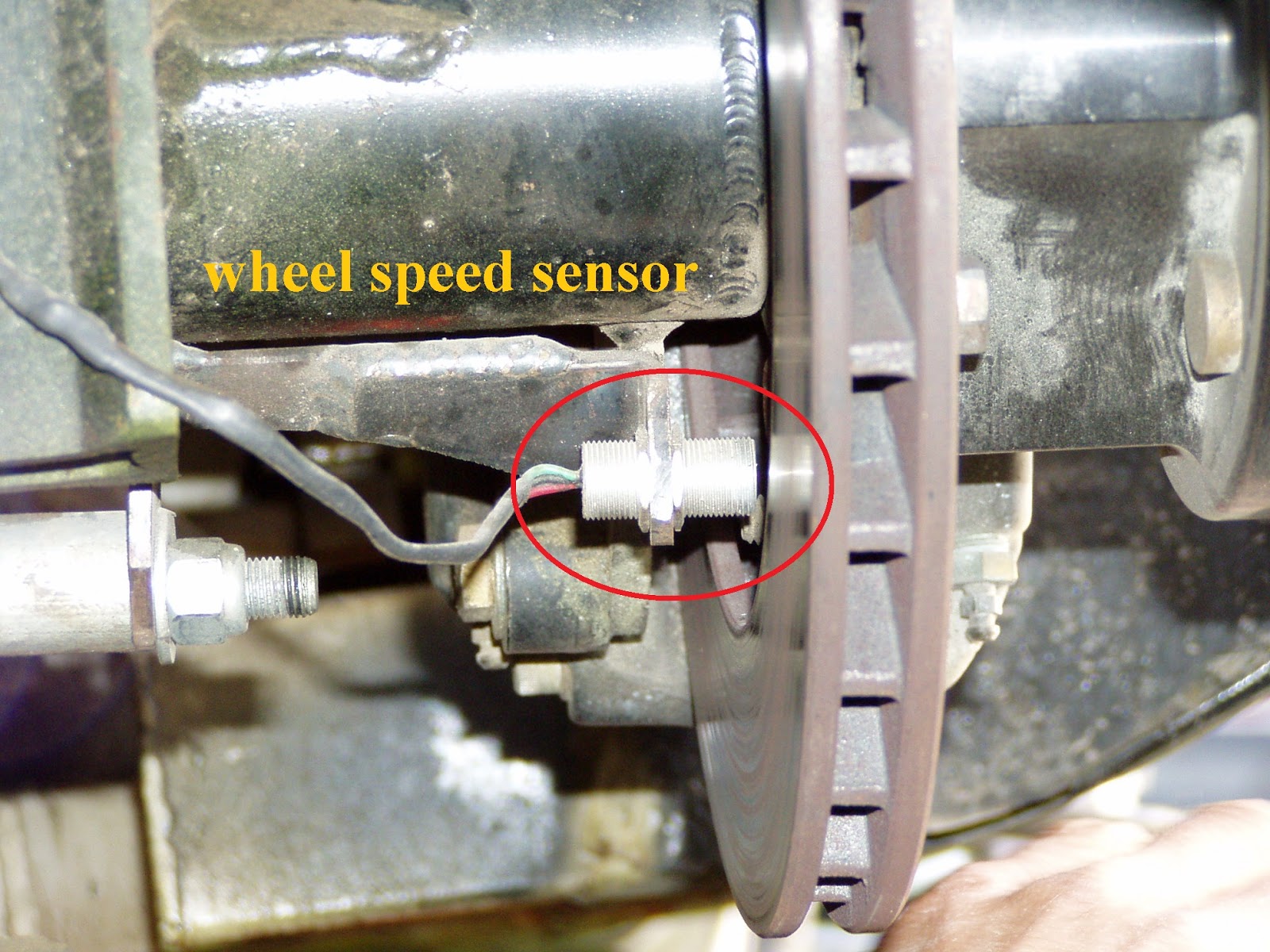
7)WHEEL SPEED SENSOR
what is wheel speed sensor?
A wheel speed sensor or vehicle speed sensor (VSS) is a type of tachometer. It is a sender device
used for reading the speed of a vehicle's wheel rotation. It
usually consists of a toothed ring and pickup.
WORKING OF CRANK SHAFT POSITION SENSOR
- This sensor is based on magnetic reluctance effect Each speed sensor usually has a toothed wheel, like a gear, that rotates at the same speed as the vehicle wheel or axle. Mounted close to, but not touching this toothed wheel, is a permanent magnet wrapped with a coil of wire, called the pick-up coil .

- As each tooth rotates past the permanent magnet, it causes the magnetic field to concentrate and increase slightly. This, in turn, induces a small pulse of current in the coil of wire. The numbers of pulses per second are directly proportional to the speed of the wheel. The faster the wheel turns, the faster the teeth pass the magnet and the higher the pulse rate.

- The toothed wheel or gear in the speed sensor is made of soft iron, usually cast. Iron is chosen because of its high magnetic permeability and low magnetic reluctance. Magnetic reluctance is roughly equivalent to electrical resistance, and sometimes the toothed wheel is called the reluctor.
- The function of the toothed wheel is to allow the permanent magnet's field to easily pass through each tooth to cause a momentary concentration of field strength which induces a current in the pick-up coil. The pick-up coil has a permanent magnet in the core, wrapped with a coil of copper wire.
8)
TEMPERATURE SENSOR
what is temperature sensor ?
The temperature sensor is used to calculate the
coolant water temperature .when the coolant water temperature is low fuel
quantity required is more. when the coolant water temperature is high fuel
quantity required is less.this temperature is sensed by sensor and monitored by
the ECU(Electronic Control Unit) to sent the right quantity of fuel to the inlet.
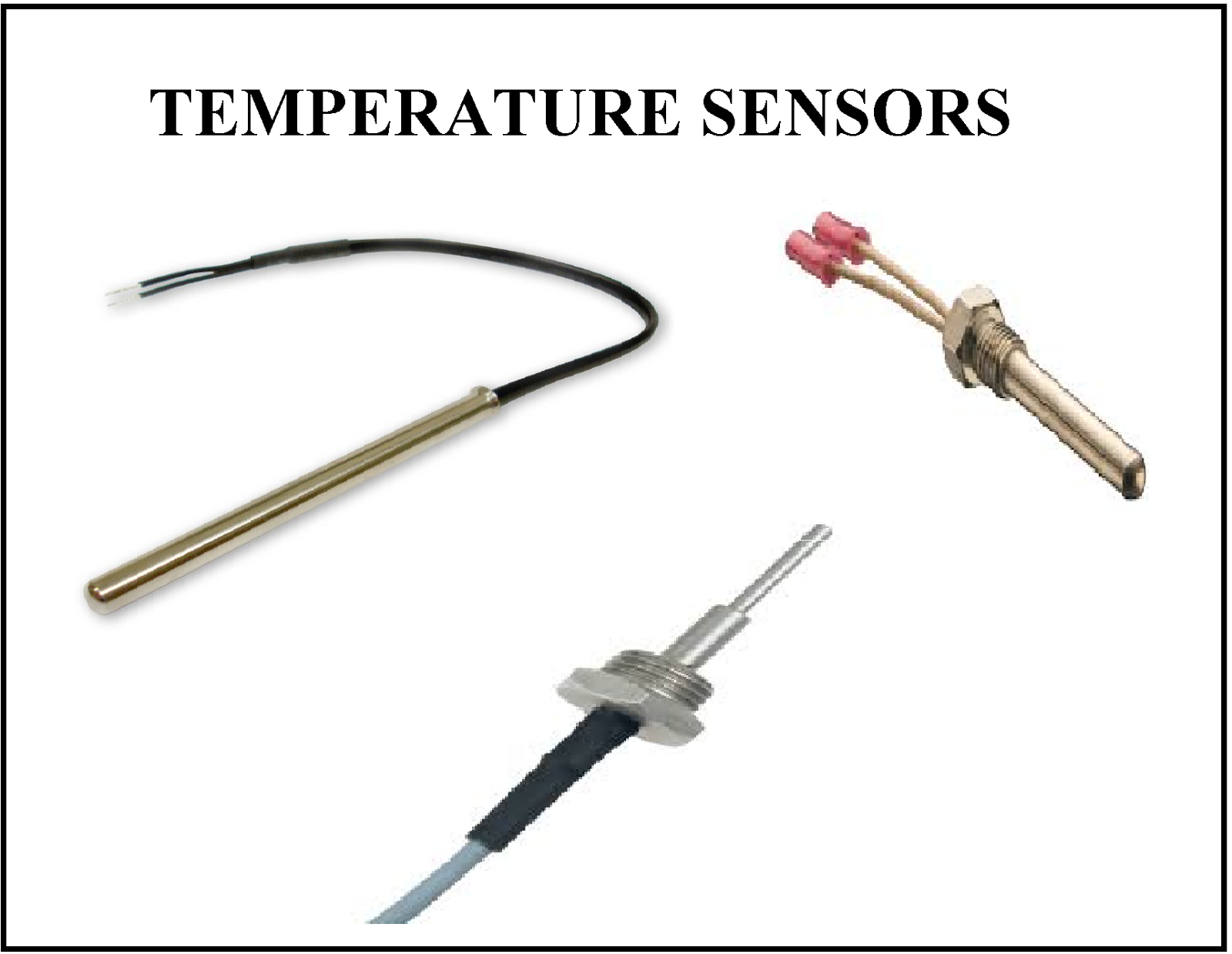
WORKING OF TEMPERATURE SENSOR
- A Temperature sensor consists of a thermistor mounted in a housing that is designed to be inserted in the coolant stream. This housing is typically threaded with pipe threads that seal the assembly against coolant leakage. A thermistor is made of semiconductor material whose resistance varies inversely with temperature. For example, at -40°C a typical temperature sensor has a resistance of 100,000 ohms. The resistance decreases to about 70,000 ohms at 130°C.
- The sensor is typically connected in an electrical circuit in which the temperature sensor resistance is denoted RT. This resistance is connected to a reference voltage through a fixed resistance R. The sensor output voltage is VT The sensor output voltage varies inversely with temperature that is, the output voltage decreases as the temperature increases.This out put voltage is linked with the ECU to maintain engine required temperature.










